路由算法
路由与转发
- 路由算法(协议)确定去往目的网络的最佳路径
- 转发表确定在本路由器如何转发分组
路由算法确定转发表。
网络抽象-图
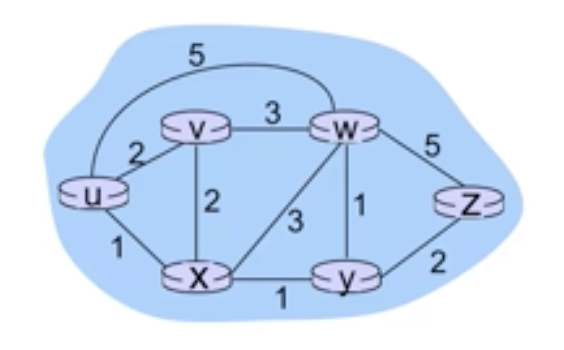
G = (N, E)
N = 路由器的集合 = {u, v, w, x, y, z}
E = 链路的集合 = {(u, v), (u, x), (v, x), (v, w), (x, w), (x, y), (w, y), (w, z), (y, z)}
图的抽象在网络领域应用很广泛。
费用/权值/代价/距离 - costs
c(w, z) = 5,有些网络抽象中每段链路的费用可以总是1(跳步数),或者可以用带宽的倒数、拥塞程度甚至金钱等来衡量,越小越好。
路径费用
路径费用=每段链路费用之和。
关键问题:源到目的的最小费用路径是什么?最短路径问题
路由算法就是寻找最小费用路径的算法。,比如导航软件堵车时提供的多条路径。
路由算法分类
静态路由 vs 动态路由
静态路由
- 手工配置
- 路由更新慢
- 优先级高(反映了人类的智慧,一般优先级高)
动态路由
- 路由更新快
- 定期更新
- 及时响应链路费用或者网络拓扑变化
全局信息 vs 分散信息
全局信息
- 所有路由器掌握完整的网络拓扑(全图)和链路费用信息
- 链路状态(LS)路由算法
分散(decentralized)信息
- 路由器只掌握物理相连的邻居以及链路费用
- 邻居间信息交换、运算的迭代过程
- 距离向量(DV)路由算法
链路状态路由算法
Dijkstra 算法
所有结点(路由器)掌握网络拓扑和链路费用,即必须知道整个图的信息。
- 通过链路状态广播/范洪/扩散的方式,让每个结点掌握全图的状态,在这个过程中会采取某些措施防止网络风暴
- 所有结点拥有相同的信息
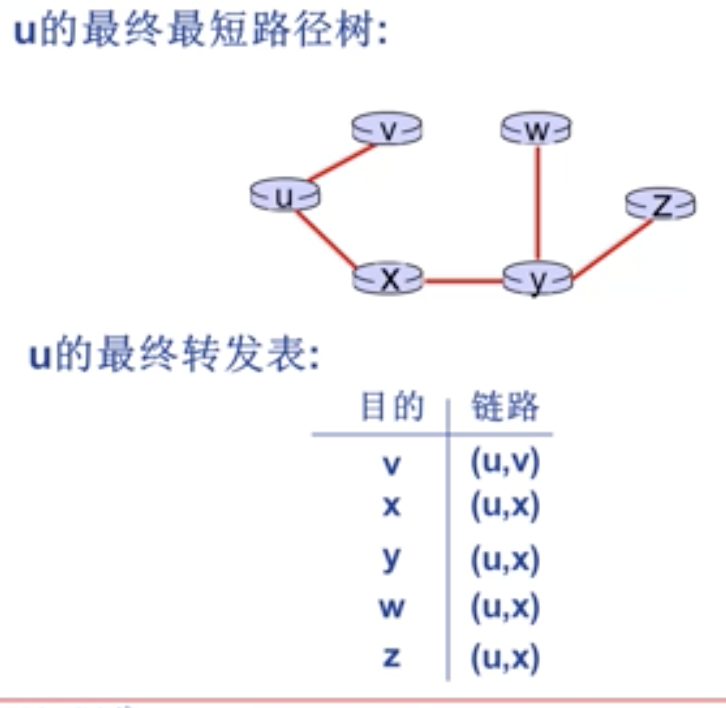
- 计算从一个结点(源)到达所有其他结点的最短路径,经过多次迭代获得该结点的转发表
- 迭代:k 次迭代后,得到到达 k 个目的结点的最短路径
符号
C(x, y): 结点 x 到 结点 y 链路的费用,如果 x 和 y不直接相连,则为 infD(v): 从源到目的 v 的当前路径(不一定是最短路径)费用值(各节点费用之和)p(v): 沿从源到 v 的当前路径,v 的前序结点N': 已找到最小费用路径的结点集合
算法过程
以 u 结点为例,寻找到各个结点的最短路径过程,前提需要收集全局信息。
1 | # 初始化 |
略
复杂性
n 个结点
- 每次迭代需要检测所有不在集合 N’ 中的结点 w
- n (n+1)/2 次比较:O(n^2)
- 更高效的实现 O(nlogn)
存在震荡oscillations可能
假设链路费用是该链路承载的通信量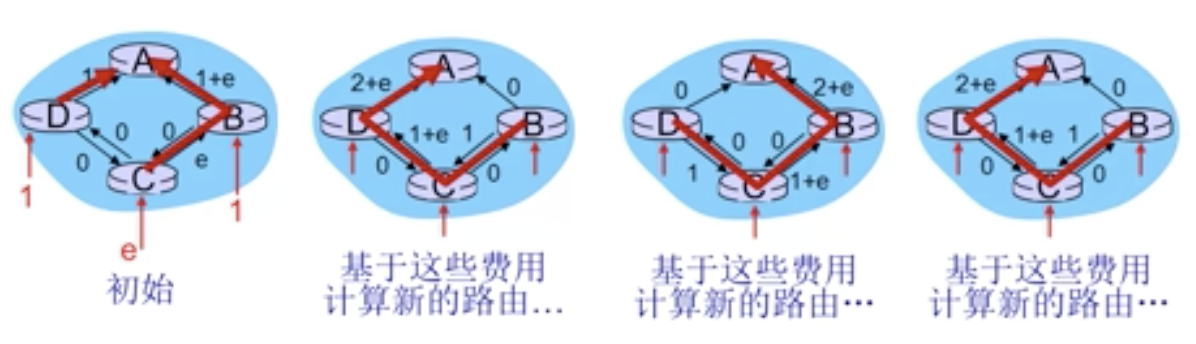
比如,在第二个图中,B 向 A 发送数据报,当数据报到达 D 时,D 的路由路由信息发生变化,
如第三个图所示,会导致数据报 TTL 超时,永远到达不了 A。
距离向量 distance vector 路由算法
Bellman-Ford 方程(动态规划)令:d(x->y) = 从 x 到 y 最短路径费用(距离)则:d(x->y)=min(c(x, v) + d(v->y))c(x, v)为 x 到邻居 v 的费用;d(v->y)为从邻居 v 到达目的 y 的费用
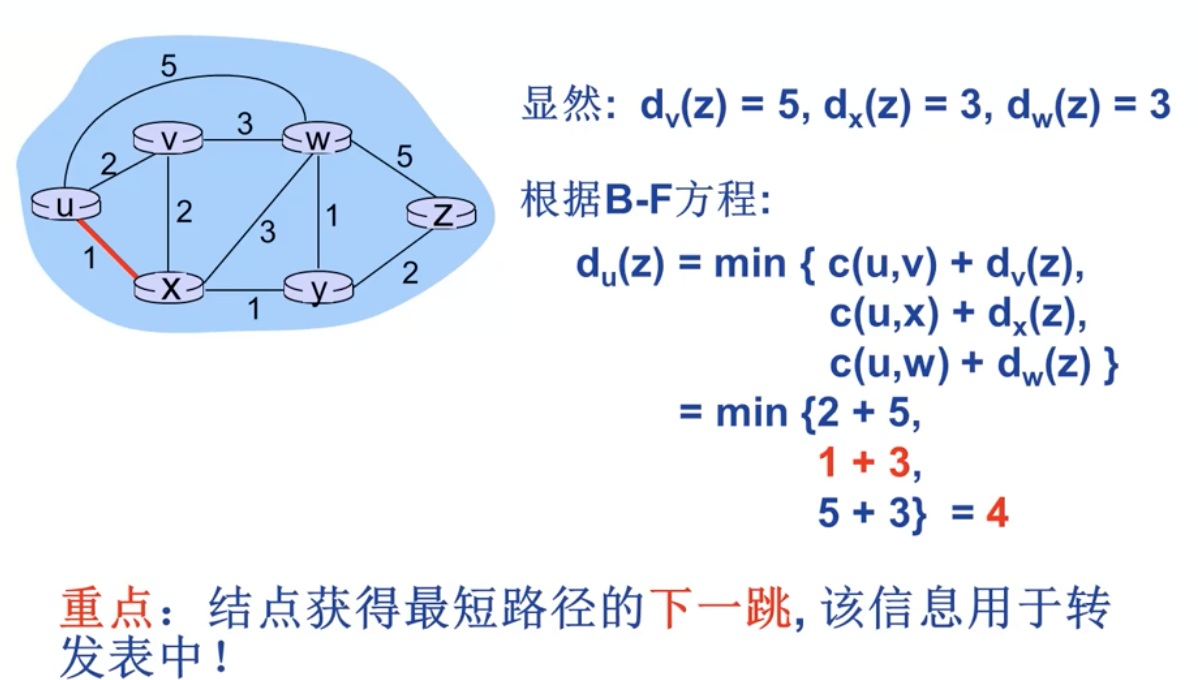
略
层次化路由
将任意规模网络抽象为一个图计算路由,过于理想化,需要标识所有路由器,是一种扁平化网络,在实际网络(尤其是大规模网络)中不可行。
聚合路由器为一个区域自治系统 AS (autonomous systems),同一个 AS 内的路由器运行相同的路由协议(算法)。
自治系统内部路由协议(intra-AS routing protocol),不同自治系统内的路由器可以运行不同的 AS 内部路由协议。
网关路由器-gateway router:位于 AS 边缘,通过链路连接其他 AS 的网关路由器。
网络规模
考虑6亿目的结点的网络
- 路由表几乎无法存储
- 路由计算过程信息交换量巨大,会淹没链路
管理自治
- 每个网络的管理可能都期望自主控制其网内的路由
- 互联网(internet) = 网络之网络(network of networks)
自治系统间路由任务
假设 AS1 内某路由器收到一个目的地址在 AS1 之外的数据报,路由器应该将该数据报转发给哪个网关路由器呢?
AS1 必须学习到哪些目的网络可以通过 AS2 到达,哪些可以通过 AS3 到达,将这些网络可达信息传播给 AS1 内部路由器。